|
trikRuntime
|
|
trikRuntime
|
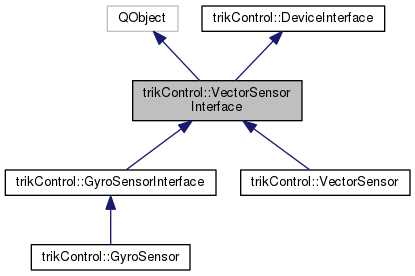
Sensor that returns a vector. More...
#include <vectorSensorInterface.h>
Public Slots | |
| virtual QVector< int > | read () const =0 |
| Returns current raw reading of a sensor. More... | |
Signals | |
| void | newData (QVector< int > reading, const trikKernel::TimeVal &eventTime) |
| Emitted when new sensor reading is ready. More... | |
Additional Inherited Members | |
 Public Types inherited from trikControl::DeviceInterface Public Types inherited from trikControl::DeviceInterface | |
| enum | Status { Status::permanentFailure, Status::temporaryFailure, Status::off, Status::starting, Status::ready, Status::stopping } |
| Device status. More... | |
| Public Member Functions inherited from trikControl::DeviceInterface | |
| DeviceInterface ()=default | |
| virtual | ~DeviceInterface ()=default |
| virtual Status | status () const =0 |
| Returns current status of the device. More... | |
| Static Public Member Functions inherited from trikControl::DeviceInterface | |
| static Status | combine (const DeviceInterface &underlying, const DeviceInterface::Status &dependent) |
| Helper method to return status of a device relying on other device to work. More... | |
Sensor that returns a vector.
|
signal |
Emitted when new sensor reading is ready.
|
pure virtualslot |
Returns current raw reading of a sensor.
 1.8.11
1.8.11 
