|
trikRuntime
|
|
trikRuntime
|
#include "powerMotor.h"#include <trikKernel/configurer.h>#include <trikKernel/exceptions/malformedConfigException.h>#include <trikKernel/exceptions/internalErrorException.h>#include <QTimer>#include "mspI2cCommunicator.h"#include "configurerHelper.h"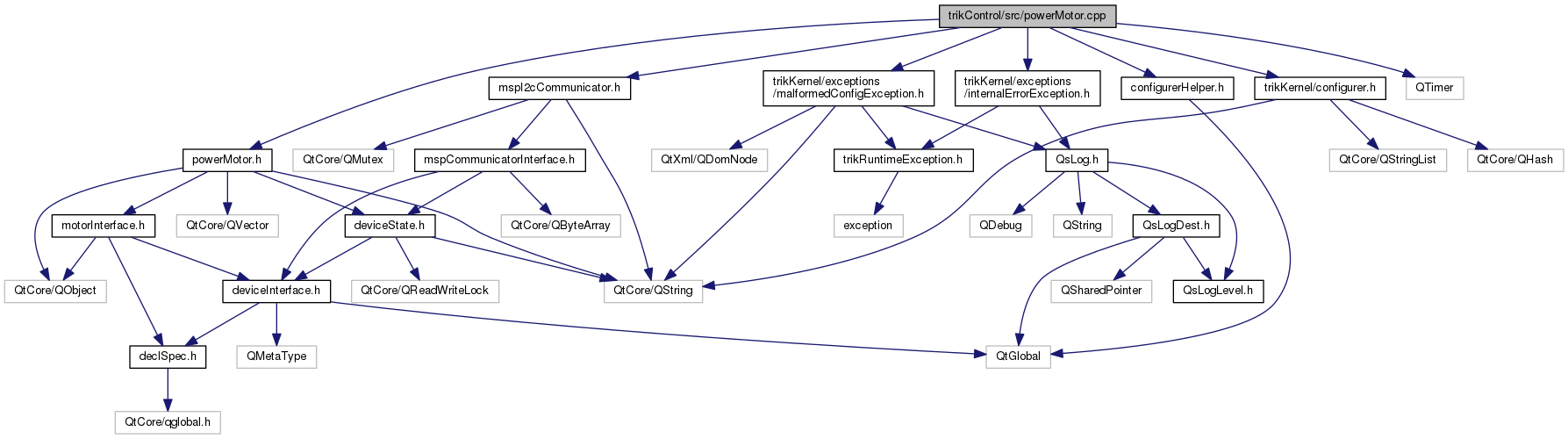
Variables | |
| static const int | maxControlValue = 100 |
| static const int | minControlValue = -100 |
|
static |
|
static |
 1.8.11
1.8.11 
