|
trikRuntime
|
|
trikRuntime
|
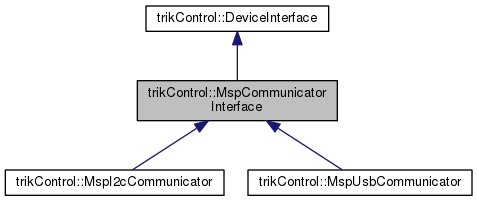
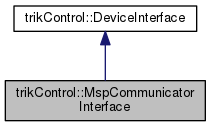
Abstract interface for communication with MSP, may be implemented by I2C or USB buses, depending on current MSP configuration. More...
#include <mspCommunicatorInterface.h>
Public Member Functions | |
| virtual void | send (const QByteArray &data)=0 |
| Send data to current device, if it is connected. More... | |
| virtual int | read (const QByteArray &data)=0 |
| Reads data by given I2C command number and returns the result. More... | |
 Public Member Functions inherited from trikControl::DeviceInterface Public Member Functions inherited from trikControl::DeviceInterface | |
| DeviceInterface ()=default | |
| virtual | ~DeviceInterface ()=default |
| virtual Status | status () const =0 |
| Returns current status of the device. More... | |
Additional Inherited Members | |
| Public Types inherited from trikControl::DeviceInterface | |
| enum | Status { Status::permanentFailure, Status::temporaryFailure, Status::off, Status::starting, Status::ready, Status::stopping } |
| Device status. More... | |
| Static Public Member Functions inherited from trikControl::DeviceInterface | |
| static Status | combine (const DeviceInterface &underlying, const DeviceInterface::Status &dependent) |
| Helper method to return status of a device relying on other device to work. More... | |
Abstract interface for communication with MSP, may be implemented by I2C or USB buses, depending on current MSP configuration.
|
pure virtual |
Reads data by given I2C command number and returns the result.
Implemented in trikControl::MspI2cCommunicator, and trikControl::MspUsbCommunicator.
|
pure virtual |
Send data to current device, if it is connected.
Implemented in trikControl::MspI2cCommunicator, and trikControl::MspUsbCommunicator.
 1.8.11
1.8.11 
