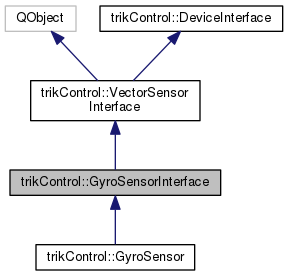
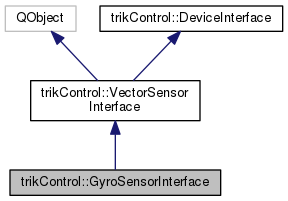
Class that returns raw and processed data from the gyroscope.
More...
#include <gyroSensorInterface.h>
|
| virtual void | calibrate (int msec)=0 |
| | Calibrates bias value of sensor, sets new bias value, resets other values include tilt values. More...
|
| |
| virtual QVector< int > | getCalibrationValues ()=0 |
| | Returns vector with calibration values, which consists of 6 elements: 0-2 – gyroscope bias, 3-5 – average accelerometer values. More...
|
| |
| virtual void | setCalibrationValues (const QVector< int > &values)=0 |
| | Sets vector with calibration values to gyroscope sensor. More...
|
| |
| virtual bool | isCalibrated () const =0 |
| | Checks if bias is counted or not. More...
|
| |
| virtual QVector< int > | readRawData () const =0 |
| | Returns current raw reading of a sensor. More...
|
| |
| virtual QVector< int > | read () const =0 |
| | Returns current raw reading of a sensor. More...
|
| |
Class that returns raw and processed data from the gyroscope.
| virtual void trikControl::GyroSensorInterface::calibrate |
( |
int |
msec | ) |
|
|
pure virtualslot |
Calibrates bias value of sensor, sets new bias value, resets other values include tilt values.
Preffered duration of calibration – 15-20 seconds.
- Parameters
-
| msec | - duration of calibration in milliseconds |
| void trikControl::GyroSensorInterface::calibrationFinished |
( |
| ) |
|
|
signal |
Emites when average mean of bias is counted.
| virtual QVector<int> trikControl::GyroSensorInterface::getCalibrationValues |
( |
| ) |
|
|
pure virtualslot |
Returns vector with calibration values, which consists of 6 elements: 0-2 – gyroscope bias, 3-5 – average accelerometer values.
Updated values is available only after calibration is done.
| virtual bool trikControl::GyroSensorInterface::isCalibrated |
( |
| ) |
const |
|
pure virtualslot |
Checks if bias is counted or not.
| virtual QVector<int> trikControl::GyroSensorInterface::readRawData |
( |
| ) |
const |
|
pure virtualslot |
Returns current raw reading of a sensor.
| virtual void trikControl::GyroSensorInterface::setCalibrationValues |
( |
const QVector< int > & |
values | ) |
|
|
pure virtualslot |
Sets vector with calibration values to gyroscope sensor.
It consists of 6 elements: 0-2 – gyroscope bias, 3-5 – average accelerometer values at rest.
The documentation for this class was generated from the following file:
 Public Slots inherited from trikControl::VectorSensorInterface
Public Slots inherited from trikControl::VectorSensorInterface 1.8.11
1.8.11 
